This is a two-part series on a new Junkbots project. In last part building the junkbot itself was discussed. In the this part controlling the junkbot via Crumble is discussed.
So build the junkbot as discussed in the previous blog post.
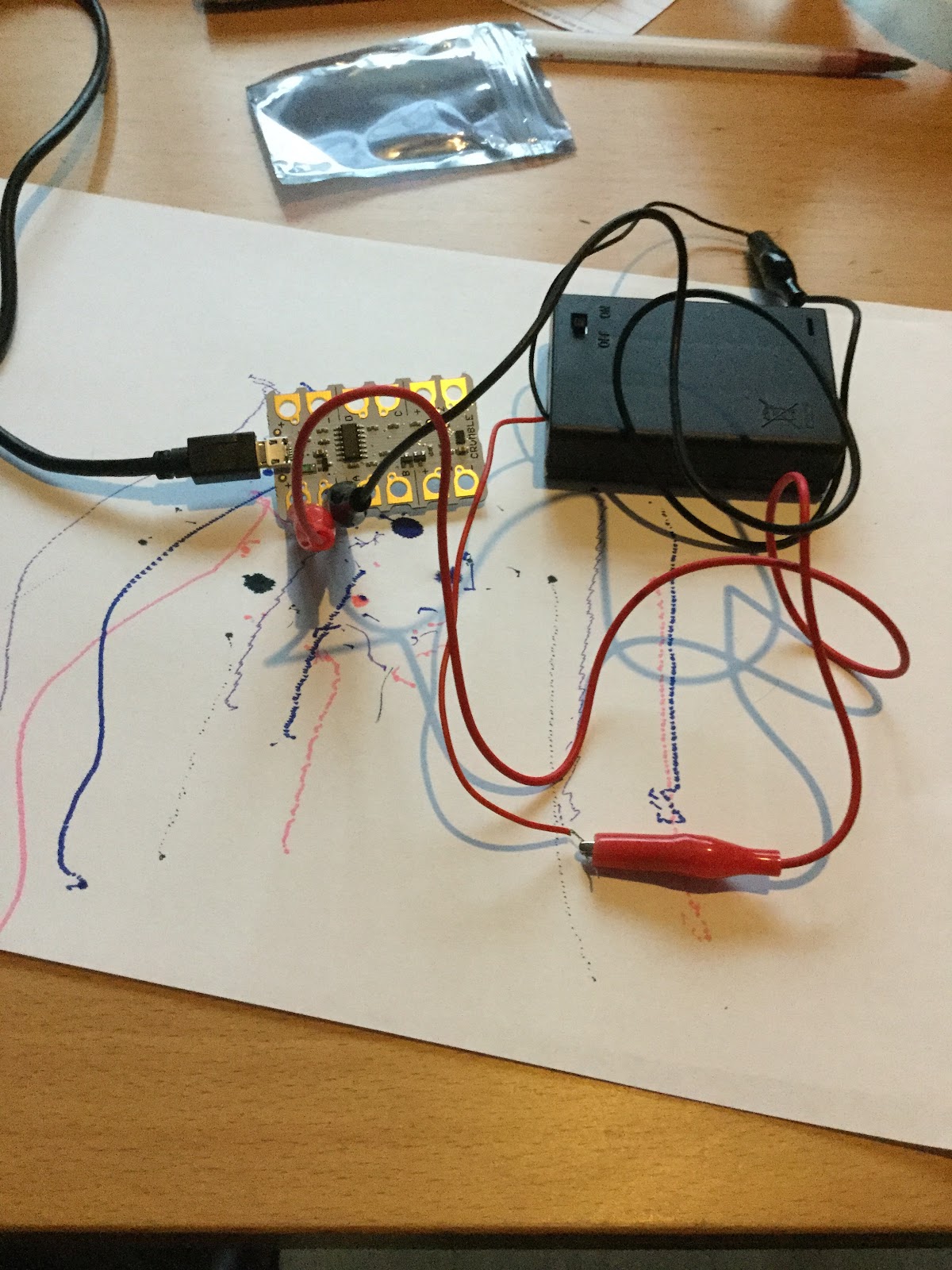
Disconnect the battery connection (the connections on the motor can stay as they are). Connect the USB cable to the Crumble. To the right of the USB connect there are two connections marked + and -. Connect a Red wire to the + connection and the other end to the red wire of the battery pack. Connect a black wire to the – connection and the other end to the black wire of the battery pack.
Stage 2: Connect the Egg!
On the Crumble, on the right-side there are two motor connections connect the Motor to these connections. Don’t worry about which of the motors wires is need you swap them ar3age 6: Programming it – Making the bot moves.
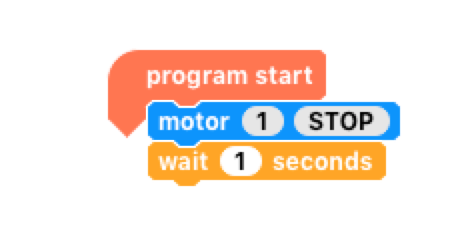
Start the Crumble software. Drag from the left the Program start, motor, and wait blocks. Now join the up start block at the top and the motor block next and the wait block last.
Your code should look like this.
Click on the stop within the motor block. It should change to forward. Now you are ready to make it move. Press the green arrow and with the battery pack on, it soud (hopefully )keeop moving.
If you put a second motor block after the wait blck with the stop inthe boSck. It su.If you put a second motor block after the wait block with the stop in the block. It such more.
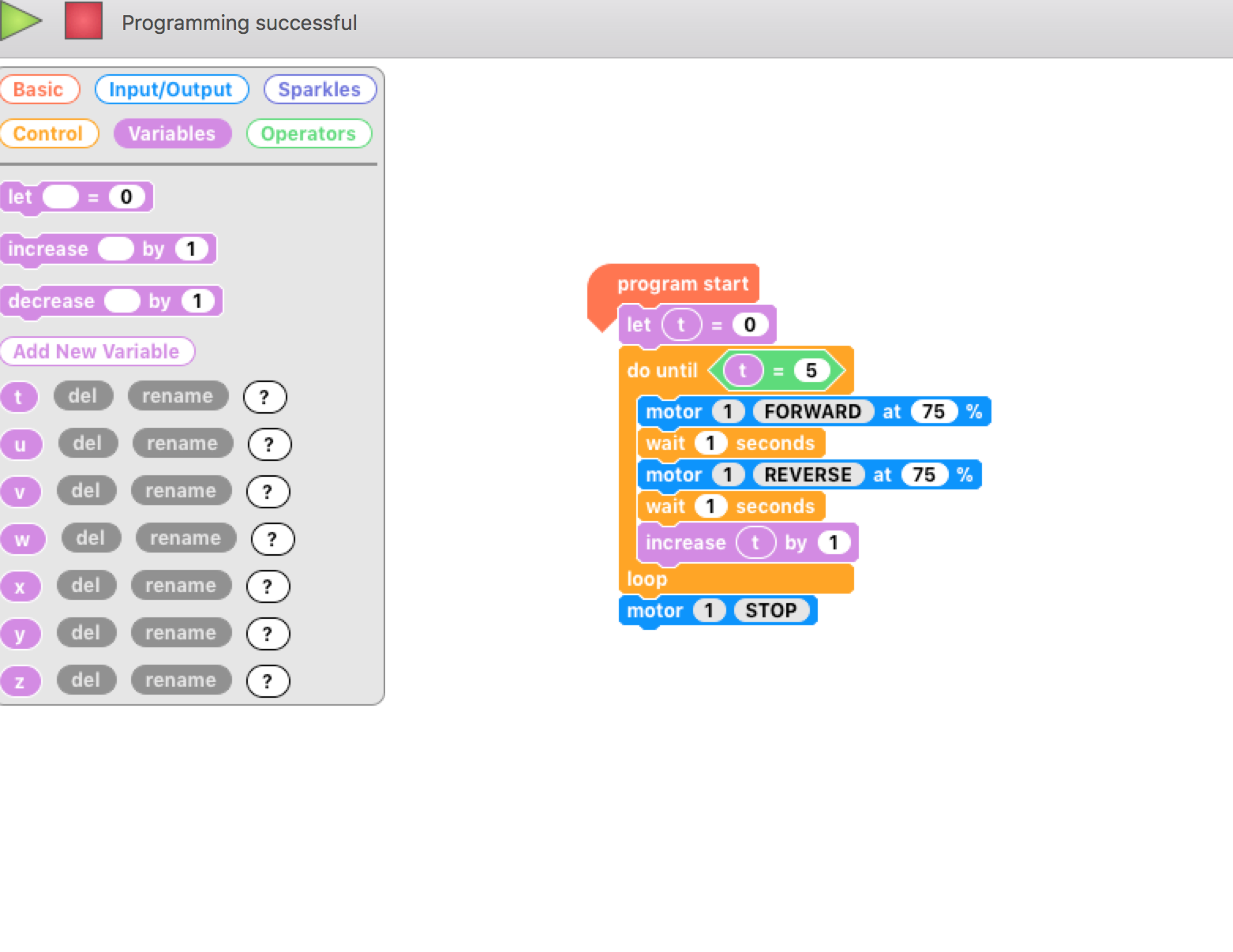
-Drag a do-until block in (found in the control menu).
-Go to variable menu and add a new variable, I have used t, select the block marked let=, and drag a t into the blank space.
-Drag an increase block onto the screen and drag a t into the blank space.
Go to the operator menu and drag onto the screen an = block, go back to variables menu and drag a t into the first space on the = block and click on the second space on the block and type in 5.
Now for the challenge put all these together to copy what is shown below. Now, put the egg-bot on the paper, with the pen lids off, it should draw.
This is a two-part series on a new Junkbots project. In this part building the junkbot itself is discussed. In the second part controlling the junkbot via Crumble is discussed. The work was first shown at Mozilla Festival 29th October 2017.
Put the vibrating motor into the Egg with the motor electrical connections sticking out the bottom larger half of the egg. Make sure the unbalanced load is free to move – this is bit that causes the vibrations needed to move the egg. The motor can be held in place by sticky-tack or strong tape, or glue (when using glue this is done under adult supervision only).
Stage 2: Sticking the pens on.
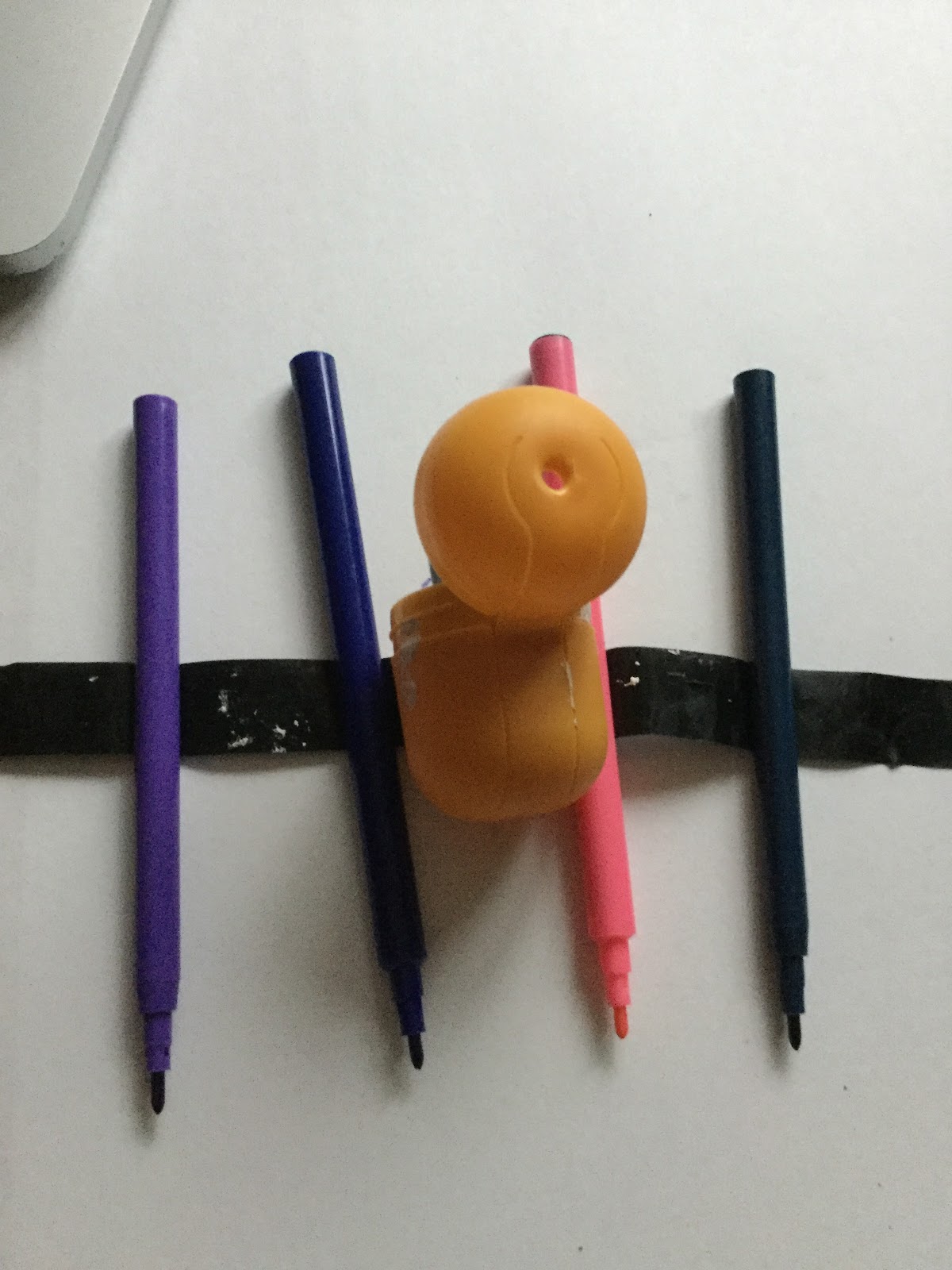
This is the trickiest bit. The easiest way to do is cut a strip of tape. Place two pens onto the tape ensuring the pens are the same length from the tape to the nib and the distance between the pens on the tape are far enough apart to place the egg between them.
If you are using three pens, the third pen should be placed so that all three form a triangle with equal sides, that means the egg can stand-up on a piece of paper on the pen nibs, without anything supporting it.
If you are using four pens, the other two pens should be placed so that all four form a square with equal sides, that means the egg can stand-up on a piece of paper on the pen nibs, without anything supporting it.
Stage 3: Add the battery pack and go.
Using two wires connecting the battery, to the motors. Remove the nibs and set the bot off. It is hopefully vibrating and shaking and scribbling lines on the paper.
In this post a Crumble controller from Redfern Electronics is used. The crumble controller is an excellent board for this project, it is relatively cheap, it is programmable with it's own graphical language, and it has motor drivers built in. In the figure to the left the parts (apart from adhesive tape) used can be seen. 1. Building the body. Tape three pens (with their lids on) on to the drinks can - making a tripod arrangement. Add (tape it on usually) a motor with something on the axle to unbalanced the motor; I use broken toy propellors but mis-shapen blu-tak; clothes pegs could be used. 2. Wiring up Using croc-clips ideally, but loops of wire if not, connect the battery to the controller and also the motors to the controller. Plug in the USB cable into the controller and the computer. 3. Running and Controlling Make sure the Crumble software (http://redfernelectronics.co.uk/crumble/) is installed on the computer. An example is shown below that drives the motor forward and then backward repeatly. You might need to change the percentage values based on experiment, for the motor used. In the video below the junkbot is shown in action.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
If you would like to know more about the Junkbots project contact scott.turner@northampton.ac.uk