This is a two-part series on a new Junkbots project. In this part building the junkbot itself is discussed. In the second part controlling the junkbot via Crumble is discussed. The work was first shown at Mozilla Festival 29th October 2017.
Three inspirations for this project
· Femi Owolade supported by Nic Hughes ran a session at Mozilla Festival 2016 using the Crumble’s to make a wheeled robot.
Kit
· Kinder Egg (without the Chocolate and toy)
· Crumble
· Tape (lots of)
· Pens
· Paper
· Scissors
· Glue and Gluegun (optional)
Stage 1: Fix the vibrating motor into the Egg.
Put the vibrating motor into the Egg with the motor electrical connections sticking out the bottom larger half of the egg. Make sure the unbalanced load is free to move – this is bit that causes the vibrations needed to move the egg. The motor can be held in place by sticky-tack or strong tape, or glue (when using glue this is done under adult supervision only).

Stage 2: Sticking the pens on.
This is the trickiest bit. The easiest way to do is cut a strip of tape. Place two pens onto the tape ensuring the pens are the same length from the tape to the nib and the distance between the pens on the tape are far enough apart to place the egg between them.
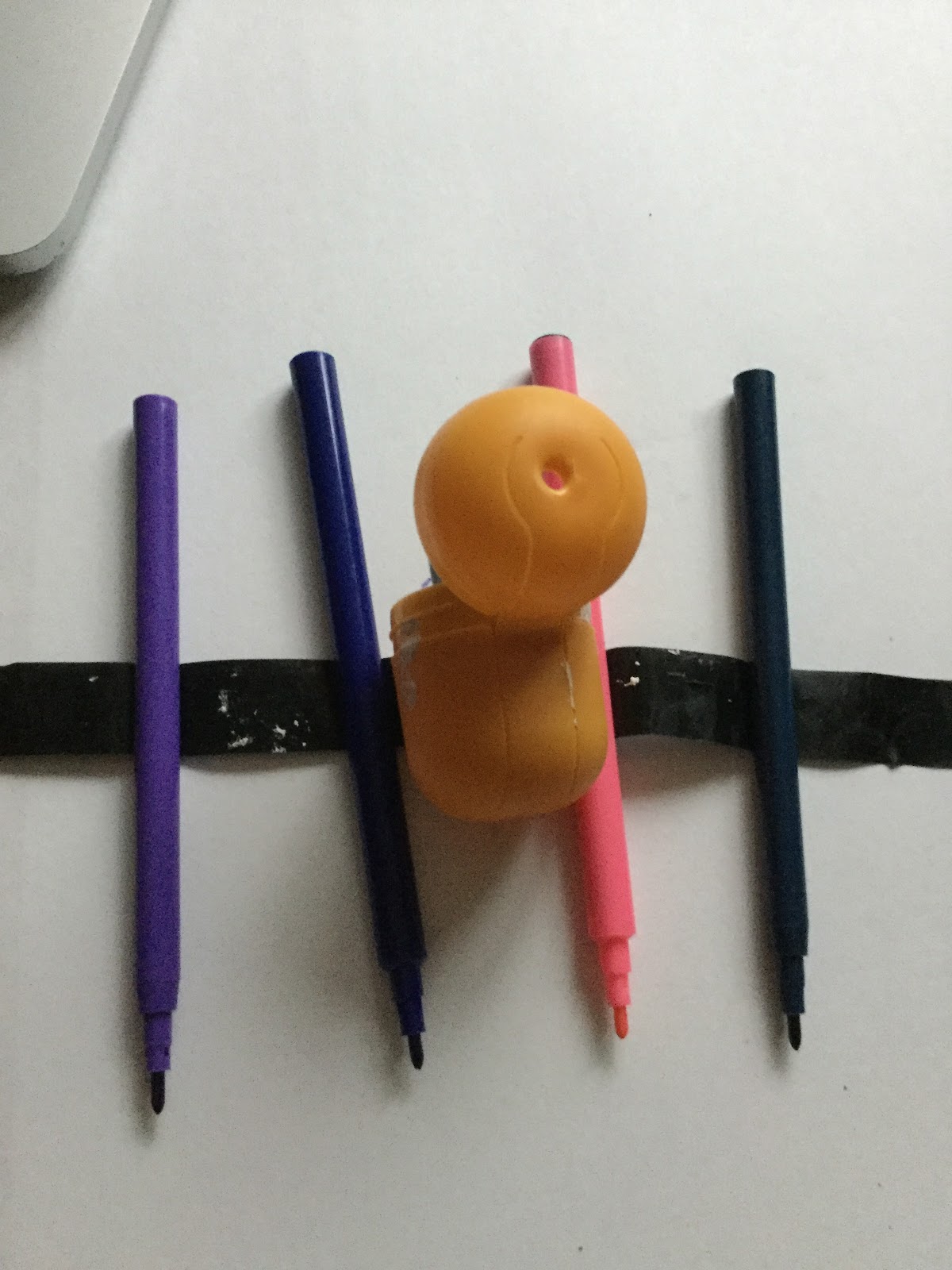
If you are using three pens, the third pen should be placed so that all three form a triangle with equal sides, that means the egg can stand-up on a piece of paper on the pen nibs, without anything supporting it.
If you are using four pens, the other two pens should be placed so that all four form a square with equal sides, that means the egg can stand-up on a piece of paper on the pen nibs, without anything supporting it.
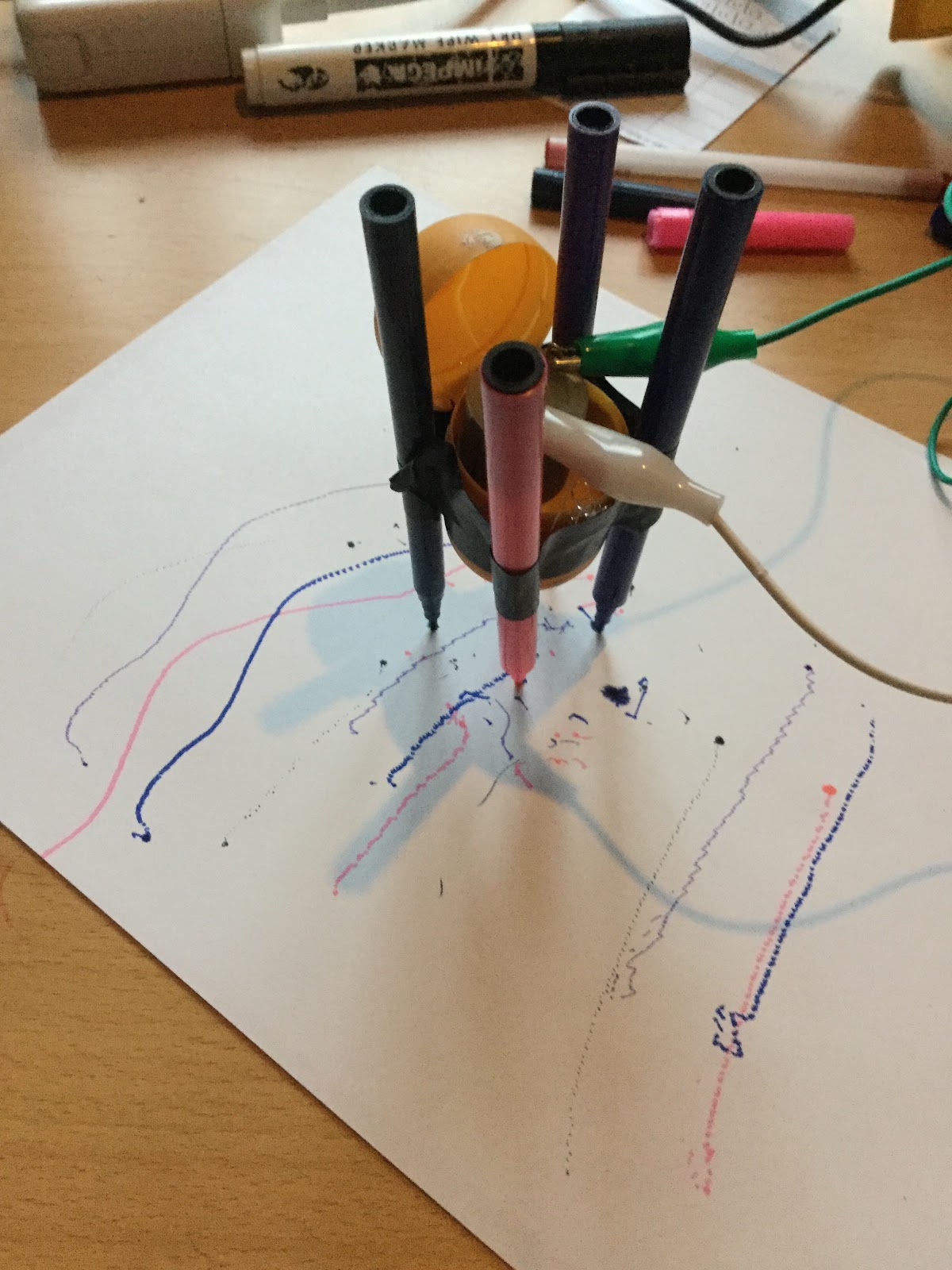
Stage 3: Add the battery pack and go.
Using two wires connecting the battery, to the motors. Remove the nibs and set the bot off. It is hopefully vibrating and shaking and scribbling lines on the paper.

To see one in action go to: https://www.youtube.com/watch?v=NRlntdmdQRo
If you would like to know more about the Junkbots project contact scott.turner@northampton.ac.uk
Comments
Post a Comment